



små barn,
store ideer

Kreativitet og idéskaping i
My
Machine!

små barn,
store ideer

Kreativitet og idéskaping i
My
Machine!
små barn,
store ideer

Kreativitet og idéskaping i
My
Machine!

Kreativitet og idéskaping i
My
Machine!
BARNESKOLEBARN
Lager ideen til sin drømmemaskin
UNIVERSITETSSTUDENTER
Leder prosessen
VIDEREGÅENDE ELEVER
Bygger og realiserer maskinene

Barnas egne
drømmemaskiner!
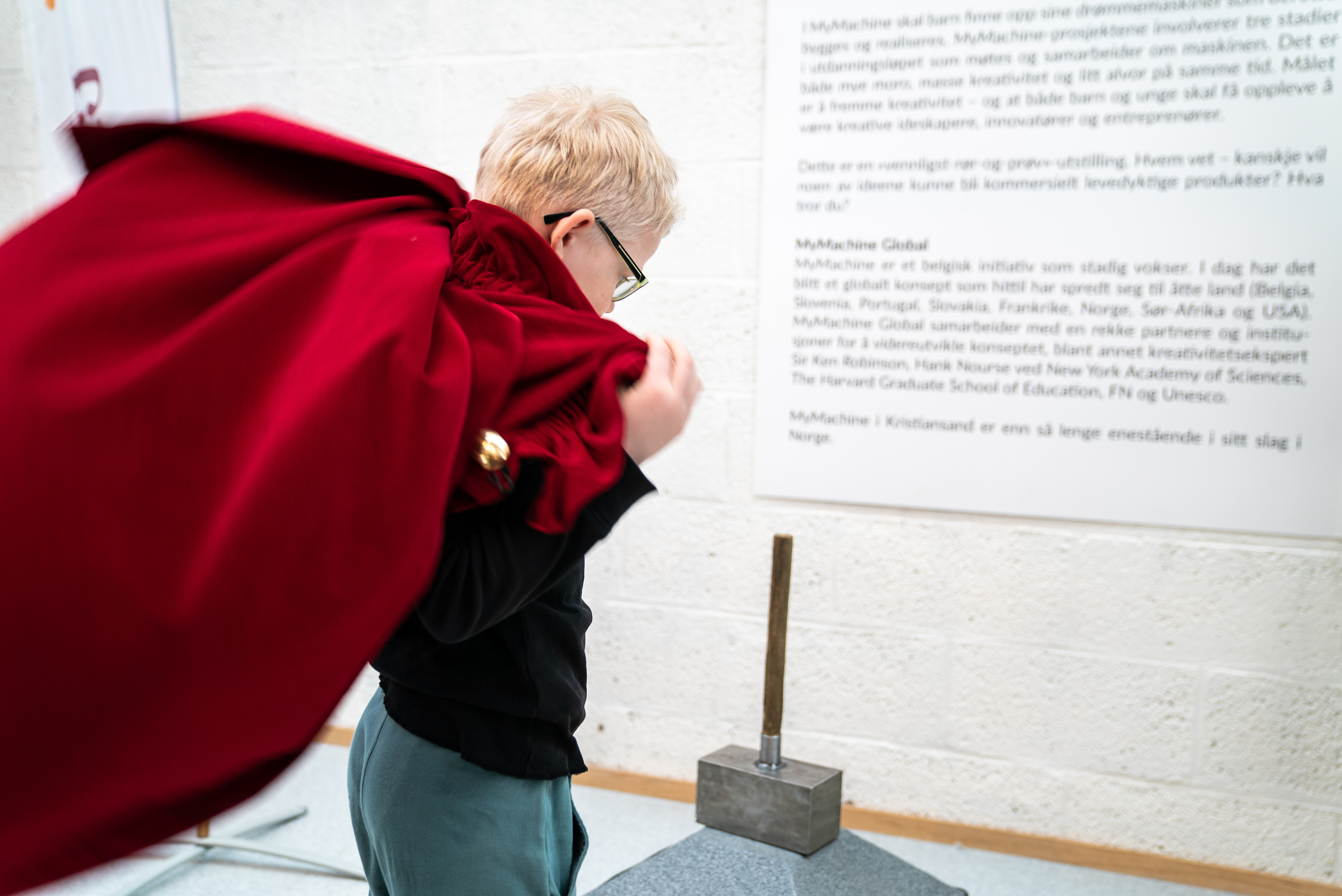
I MyMachine skal barn finne opp sine drømmemaskiner som deretter bygges og realiseres. MyMachine-prosjektene involverer tre stadier i utdanningsløpet som møtes og samarbeider om maskinen. Gjennom hele prosessen er det barnet som plasseres i den skapende og avgjørende rollen i en realisering av deres egen drømmemaskin.



On 12 des 202312/12/2023
Samkjøring av plan for realisering av 3. klasse Øvre Slettheia sin drømmemaskin





Vil du delta i MyMachine som student?
MyMachine ønsker å rekruttere studenter fra alle fag
Vil du bidra med din kompetanse som partner fra kultur- og næringsliv?
MyMachine Norge er foreløpig støttet av Agder Fylkeskommune, Kristiansand kommune og Glencore Nikkelverket.
MyMachine Global